लेखक:
Christy White
निर्मितीची तारीख:
4 मे 2021
अद्यतन तारीख:
15 मे 2024

सामग्री
लेगो माइंडस्टॉर्म एनएक्सटी रोबोट्स एक उत्तम खेळण्यासारखे आहे आणि प्रोग्राम कसे शिकवायचे याचा एक चांगला मार्ग आहे. रोबोटसह येणारा प्रोग्राम वापरण्यास सोपा आणि अंतर्ज्ञानी आहे आणि त्यासह आपण आपला रोबोट काहीही करु शकता. लेगो तुकड्यांचा वापर करून रोबोट बनवल्यानंतर, एखादे कार्य करण्यासाठी कार्य करण्याची वेळ आली आहे, किंवा कार्यांचे संयोजन. शिकण्यासाठी वाचन सुरू ठेवा.
पायर्या
5 पैकी भाग 1: प्रारंभ करणे
प्रोग्राम स्थापित आणि उघडा. रोबोट मॅक आणि विंडोज दोहोंसाठी समाविष्ट असलेल्या प्रोग्रामसह आला पाहिजे किंवा आपण तो लेगो माइंडस्टॉर्म वेबसाइटवरून डाउनलोड करू शकता. आपण डिस्क घातल्यास किंवा डाउनलोड उघडता तेव्हा, स्थापना विंडो येईल. प्रोग्राम स्थापित करण्यासाठी सूचनांचे अनुसरण करा आणि नंतर ते उघडा.
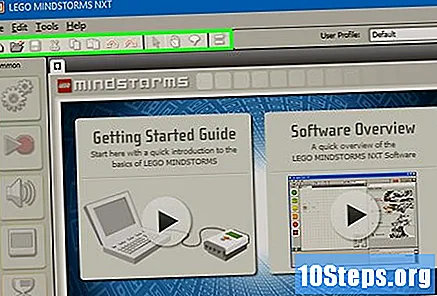
प्रोग्राम नॅव्हिगेट कसे करावे ते शिका. आपला प्रोग्राम जतन करण्यासाठी अस्तित्वातील प्रोग्राम उघडण्यासाठी किंवा नवीन तयार करण्यासाठी शीर्षस्थानी टूलबार वापरा. ऑपरेशन्स समाविष्ट करण्यासाठी, हलविण्यासाठी आणि हटविण्यासाठी "पॉइंटर" टूल वापरा, जे काळा बाणासारखे आकाराचे आहे. "पॅन" टूल, जे थोडेसे पांढर्या हातासारखे दिसते आहे, आपल्याला विंडोच्या आत प्रोग्राम विंडो ड्रॅग करण्याची परवानगी देते जेणेकरून आपण त्यातून नेव्हिगेट करू शकता. कमेंट टूल, स्पीच बबलच्या आकारात, आपल्याला आपल्या प्रोग्रामच्या काही भागांमध्ये मजकूर प्रविष्ट करण्याची परवानगी देते, जेणेकरून आपण टिप्पण्या जोडू शकता आणि आपला प्रोग्राम इतरांना समजण्यास मदत करू शकता.- विंडोच्या उजव्या बाजूस, रोबो सेंटरमध्ये आपण तयार करू शकता आणि प्रोग्राम करू शकता अशा अनेक भिन्न रोबोट्सची ट्यूटोरियल आणि सूचना आहेत. दुसरा टॅब, रोबो सेंटरच्या शीर्षस्थानी, त्याचे पोर्टल उघडतो, जो आपल्याला आपल्या प्रोग्रामिंगमध्ये मदत करण्यासाठी ऑनलाइन संसाधनांमध्ये प्रवेश देतो.
- खालच्या उजव्या कोपर्यात या ऑपरेशनचे वर्णन उघडण्यासाठी ऑपरेशनवर माउस ठेवा आणि विंडोच्या तळाशी त्या ऑपरेशनची सेटिंग्ज पहा किंवा त्यामध्ये बदल करा.
वेगवेगळ्या ऑपरेशन्समध्ये प्रवेश कसा मिळवावा ते शिका. डावीकडील टास्कबारमध्ये आपला रोबोट करू शकणार्या सर्व ऑपरेशन्स समाविष्ट करतो. बारच्या शेवटी असलेले तीन टॅब आपल्याला या ऑपरेशन्सच्या वेगवेगळ्या सेटमध्ये प्रवेश देतात. आपल्या रोबोटमध्ये असू शकतात भिन्न कार्ये शोधण्यासाठी आणि त्याचा अनुभव घेण्यासाठी ते एक्सप्लोर करा.- हिरव्या मंडळासह सर्वात डावीकडील टॅबमध्ये मूव्ह (मोशन), ध्वनी (आवाज), पळवाट (पुनरावृत्ती) आणि स्विच सारख्या सर्वात सामान्य ऑपरेशन्स असतात. हा लेआउट आपल्याला सर्वात जास्त वापरलेल्या ऑपरेशन्समध्ये द्रुत प्रवेश प्रदान करतो परंतु तो आपल्याला उर्वरित भागात प्रवेश देत नाही.
- मध्यम टॅबमध्ये तीन रंगांचे चौरस आहेत आणि सर्व समाविष्ट ऑपरेशन्स आहेत ज्या श्रेणींमध्ये विभागल्या आहेत. आवाज चालविणे किंवा रंगीत प्रकाश सक्रिय करणे यासारख्या सामान्य ऑपरेशन्स आणि क्रियांवर प्रवेश करण्यासाठी आपला माउस शीर्षस्थानी हिरव्या वर्तुळावर ठेवा. सर्व ऑपरेशन्स शोधण्यासाठी इतर बटणे एक्सप्लोर करा.
- शेवटच्या टॅबमध्ये, समान चिन्हासह, आपण इंटरनेटवरून तयार केलेले किंवा डाउनलोड केलेले कार्य अनुकूलित ऑपरेशन्स आहेत.
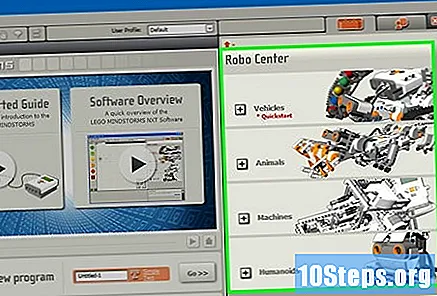
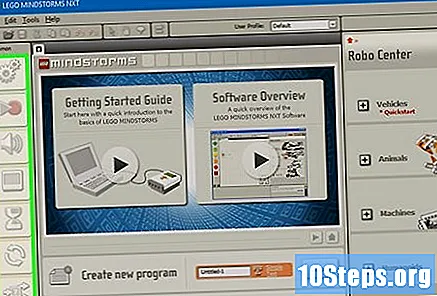
ट्यूटोरियल सह प्रारंभ करा. प्रोग्राममध्ये अनेक ट्यूटोरियल समाविष्ट आहेत जे आपल्या पहिल्या प्रोग्राम्सद्वारे मार्गदर्शन करतील. उजवीकडील रोबो सेंटरवर जा आणि आपण तयार करू इच्छित प्रोग्राम श्रेणीवर क्लिक करा. आपल्या पहिल्या प्रोग्रामसाठी वाहनांमधील नेमबोटसह प्रारंभ करण्याचा विचार करा. हे ट्यूटोरियल सोपे आहे, परंतु आपल्याला उपलब्ध असलेल्या मूलभूत नियंत्रणे तसेच सामान्य कोडिंग आणि चाचणी पद्धतींचा परिचय करुन देईल.
आपल्या ट्यूटोरियलमधील सूचनांचे अनुसरण करून ऑपरेशन्स आपल्या प्रोग्राममध्ये ड्रॅग करा. प्रत्येक ऑपरेशन आपल्याला जे करायचे आहे तेच करते हे सुनिश्चित करण्यासाठी आपली सेटिंग्ज आवश्यकनुसार बदला. आपल्या क्रियेतून जाणा current्या सद्यस्थितीत जोडलेल्या विविध क्रियांना अनुक्रमात ठेवून सामील व्हा. लूपच्या आत ऑपरेशन्स ठेवा किंवा त्या ऑपरेशनला त्या नियंत्रण विधानात समाविष्ट करण्यासाठी स्विच करा.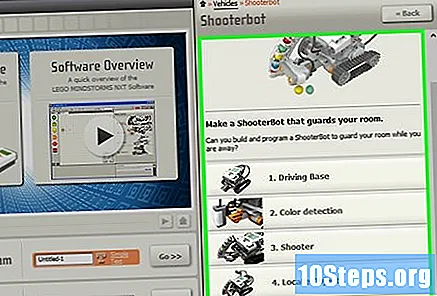
आपण आपला प्रोग्राम समाप्त केल्यावर, आपल्या रोबोटच्या बुद्धिमान वीटवर डाउनलोड करा. यूएसबी केबलचा वापर करुन वीट संगणकावर कनेक्ट करा. आपल्या प्रोग्राम विंडोच्या उजव्या कोप in्यात बटणाचे स्क्वेअर आपल्याला कनेक्ट केलेल्या एनएक्सटी डिव्हाइससह संप्रेषण करण्याची परवानगी देतात. या बटणाच्या खाली डावीकडे प्रोग्राम आपल्या डिव्हाइसवर डाउनलोड करेल. एकदा आपण डाउनलोड करणे समाप्त केले की, बुद्धिमान वीट डिस्कनेक्ट करा, आपल्या रोबोटमध्ये घाला आणि ती चालते की नाही ते पहाण्यासाठी प्रोग्राम प्रारंभ करा.
5 पैकी भाग 2: आपला रोबोट नियंत्रित करत आहे
हलवा ऑपरेशनसह आपला रोबोट हलवा. या ऑपरेशनमध्ये दोन गीअर्स आहेत. आपल्या प्रोग्राममध्ये जोडा आणि आपल्या सेटिंग्ज समायोजित करा. आपला रोबोट हलविण्यासाठी टायर्सला जोडलेले दारे वापरा. आपण चाके बंदरगाह ब आणि सीशी जोडल्यास, बी आणि सी बंदरांसाठी हलवा ऑपरेशन कॉन्फिगर केले असल्याचे सुनिश्चित करा.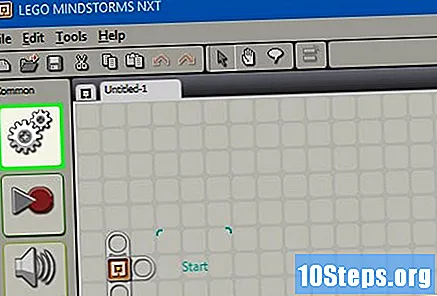
- पुढे जा, मागे जा, किंवा दिशा निश्चित करुन पूर्णपणे थांबा. स्टीयरिंग नियंत्रणे वापरुन वळा.
- ठराविक क्रांती, ठराविक वेळ किंवा अनेक अंशांद्वारे पुढे जा. किंवा, कालावधी "अमर्यादित" वर सेट करा जेणेकरून आपला रोबोट आपल्यास आज्ञा प्राप्त होईपर्यंत पुढे जाईल, नंतर प्रोग्राममध्ये, थांबायला.
इंजिन कमांडद्वारे शूटिंग यासारखी इतर ऑपरेशन्स करा. शूटबोट ट्यूटोरियल मध्ये, आपले स्निपर पोर्ट ए शी कनेक्ट होते. हे नियंत्रित करण्यासाठी, पोर्ट ए सक्रिय करणारे मोटर ऑपरेशन (सिंगल गियर म्हणून दर्शविलेले) वापरा (दिशा पुढे करून पुढे या मोटारीचे नेमके ऑपरेशन नियंत्रित करण्यासाठी सेटिंग्ज समायोजित करा. पुढे), मागासलेला किंवा थांबलेला (पारड)) क्रिया, सामर्थ्य पातळी आणि हालचालींचा कालावधी.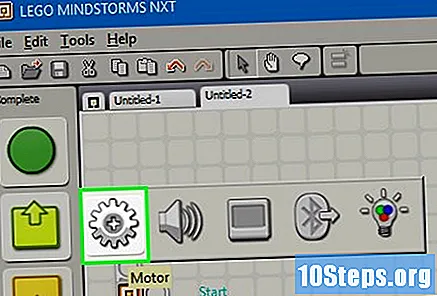
- "पूर्ण होण्याची प्रतीक्षा करा" ची निवड न करणे रोबोटला मोटर ऑपरेशनद्वारे नियंत्रित हालचाली पूर्ण करण्यापूर्वी त्याच्या प्रोग्राममधील पुढील कमांडची अंमलबजावणी करण्यास परवानगी देते. हे आपल्या रोबोटला अनुमती देऊ शकते, उदाहरणार्थ, एकाच वेळी चालणे आणि शूट करणे.
- मोटर कमांड नियंत्रित करते त्या मोटरद्वारे कोणतीही कार्यवाही करेल. आपला रोबोट तयार करा जेणेकरून इंजिन ट्रे उंचावेल, बॉल फेकवेल, रोबोट फिरवेल किंवा आपल्याला पाहिजे असलेले काहीही करेल. ही आज्ञा आपल्या रोबोटच्या कामगिरीमध्ये सर्जनशीलता आणि लवचिकता अनुमती देते; त्याचा फायदा घ्या.
आपल्या रोबोटला पर्यावरणाशी संवाद साधू देण्यासाठी सेन्सर्स वापरा. स्मार्ट चिप पोर्टवर अल्ट्रासोनिक, टच आणि कलर सेन्सर ठेवा आणि त्यांचा उपयोग प्रकाश, रंग, आवाज आणि स्पर्श जाणवण्यासाठी करा. आपला रोबोट वेळोवेळी अनुसरण करू शकतो आणि त्याचे फिरणे देखील जाणून घेऊ शकतो. हे सेन्सर्स आपल्या प्रोग्रामला सक्रिय केल्यावरच कारवाई करण्यास अनुमती देतात. उदाहरणार्थ, आपल्याकडे एक प्रोग्राम असू शकतो ज्यामध्ये "लाल" असे म्हटले जाते जेव्हा तो रंग लाल रंगाचा आढळतो, परंतु जेव्हा त्याचा रंग निळ्या रंगाचा असतो तेव्हा नाही.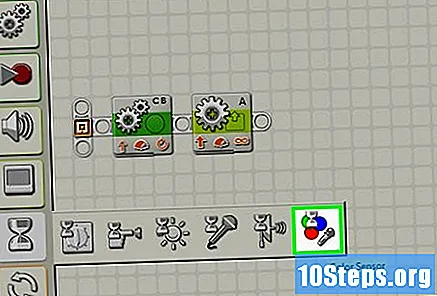
आपल्या रोबोटला गोष्टी करण्यासाठी ऑपरेटिंग क्रियांचा वापर करा. या गोष्टींमध्ये रंगीत प्रकाश चालू करणे किंवा बंद करणे, फाईलमधून आवाज प्ले करणे, एखादी प्रतिमा प्रदर्शित करणे किंवा बुद्धिमान वीट स्क्रीनवरील मजकूर किंवा ब्लूटूथद्वारे संदेश पाठविणे समाविष्ट आहे.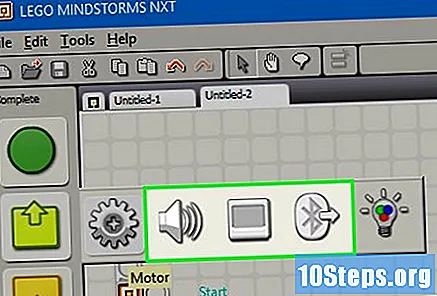
5 चे भाग 3: पळवाट आणि स्विच वापरणे
पळवाट कसे कार्य करतात ते समजून घ्या. एखादी विशिष्ट स्थिती सत्य असल्याशिवाय किंवा एखादी विशिष्ट क्रिया होईपर्यंत ते आपल्याला वारंवार, अनिश्चित काळासाठी किंवा निर्दिष्ट वेळेसाठी आदेशांची मालिका करण्याची परवानगी देतात.
- उदाहरणार्थ, आपला रोबोट पिवळ्या रंगाचा सापडत नाही तोपर्यंत कित्येक बॉलची तपासणी करण्यासाठी, कलर सेन्सरद्वारे नियंत्रित लूप तयार करा. पळवाटातील कृती पुढील केकची तपासणी करण्यास जबाबदार असतील; लूपचे नियंत्रण असे होईल की कलर सेन्सरने पिवळा रंग ओळखला नाही. अशा प्रकारे, जेव्हा कलर सेन्सर, बॉलची तपासणी केल्यावर, पिवळा रंग ओळखतो, तेव्हा तो नवीन बॉलची तपासणी करणे थांबवेल आणि प्रोग्रामच्या पुढील भागावर जाईल.
स्विच कसे कार्य करतात ते समजून घ्या. एखादी विशिष्ट स्थिती सत्य असल्यास आणि कार्यवाहीचा एक वेगळा सेट, सत्य नसल्यास स्विच आपल्या रोबोटला आदेशांची मालिका करण्यास सांगते. क्रियांच्या या दोन मालिका स्विचवर परस्पर अनन्य आहेत: रोबोट एक करेल, परंतु दुसरा नाही.
- कारवाई करण्यापूर्वी वेगवेगळ्या परिस्थिती तपासण्यासाठी घरट्यांपैकी एक स्विच. उदाहरणार्थ, आपला रोबोट हलका किंवा आवाज न आढळल्यास पुढे नेण्यासाठी नेस्टेड स्विचेस वापरा. प्रथम स्विच प्रकाशासाठी पाहेल; जर काहीही आढळले नाही, तर रोबोट दुसर्या स्विचमध्ये प्रवेश करेल, जो आवाज शोधतो. फक्त जर ध्वनी सापडला नाही (प्रकाश न सापडल्यानंतर) रोबोट पुढे जाईल.
- मूल्य-नियंत्रित स्विचमध्ये एकापेक्षा जास्त प्रकरणांचा समावेश करण्यासाठी, स्विच सेटिंग्जमध्ये "फ्लॅट व्ह्यू" पर्यायाची निवड रद्द करा आणि अटींच्या सूचीच्या उजव्या बाजूला, आणखी एक केस जोडण्यासाठी "+" दाबा. संख्या किंवा मजकूर संदेश नियंत्रित करताना हे उपयुक्त आहे, ज्यामध्ये दोनपेक्षा अधिक भिन्न मूल्ये असू शकतात.
आपल्या प्रोग्राममध्ये लूप ड्रॉप करा किंवा स्विच करा आणि नियंत्रण निवडा. स्विच किंवा लूपच्या आत कमांड बनवण्यापूर्वी रोबोट ज्या स्थितीची तपासणी करेल त्यास हे परिभाषित करेल. नियंत्रण सामान्यत: सेन्सर असेल. हे रोबोटला त्याच्या वातावरणाशी जवळ संवाद साधू देते.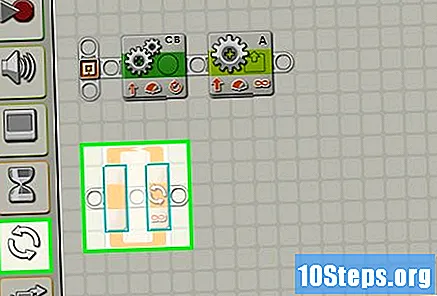
- स्विचेस व्हॅल्यूद्वारे देखील नियंत्रित केले जाऊ शकतात. डेटा केबलचा वापर करून स्विचच्या लक्ष्य क्षेत्रात एक व्हेरिएबल जोडा. संख्या किंवा मजकूरांच्या विविध मूल्यांसाठी प्रकरणे जोडा. उदाहरणार्थ, व्हेरिएबल संख्या 0 असल्यास आपला रोबोट कमांडची मालिका कार्यान्वित करू शकेल, 1 असल्यास इतर कमांडस आणि इतर कमांड इतर कुठल्याही संख्येने असल्यास.
- लूप देखील वेळेद्वारे नियंत्रित केले जाऊ शकतात - त्यातील स्टेटमेंट्स निर्दिष्ट वेळ किंवा मोजणीसाठी अंमलात आणल्या जातील. रोबोटने ही कामे अनिश्चित काळासाठी पूर्ण करण्यासाठी एखादी विशिष्ट स्थिती सत्य किंवा खोटी ठरल्यास किंवा लूप चालविण्यासाठी लॉजिक निवडा.
लूप किंवा स्विचमध्ये इतर कमांड ड्रॅग करा. जेव्हा आपण लूपमध्ये ठेवता तेव्हा कोणतीही ऑपरेशन्स केली जातील. जर केसची अट पूर्ण केली तर स्विचच्या प्रत्येक केसवर आपण केलेले ऑपरेशन केले जातील. नेहमीप्रमाणे ही ऑपरेशन्स ठेवा आणि कॉन्फिगर करा.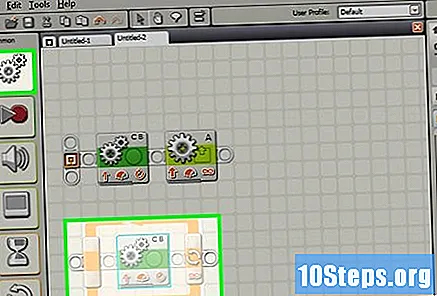
- आपण इच्छित असल्यास लूप आणि इतर लूपमध्ये स्विच समाविष्ट करू शकता.
5 चा भाग 4: व्हेरिएबल्स वापरणे
चलांचा वापर समजून घ्या. व्हेरिएबल्स माहिती संचयित करू शकतात, जेणेकरून आपण नंतर आपल्या प्रोग्राममध्ये त्यात प्रवेश करू शकता. त्यांचा एक बॉक्स म्हणून विचार करा ज्यामध्ये आपण विशिष्ट माहिती ठेवता. त्यानंतर आपण ही माहिती बॉक्स बदलू शकत नाही - बदलू शकता - स्वतःच बदलू शकता किंवा बदलू शकता.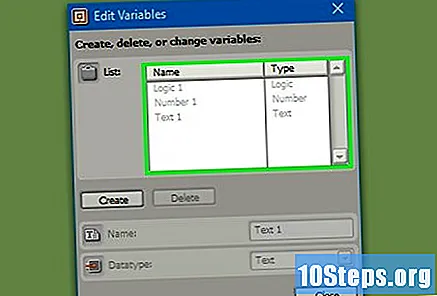
- प्रत्येक चल एक संख्या, मजकूर किंवा तार्किक मूल्य (सत्य किंवा खोटे) संचयित करू शकतो. आपण व्हेरिएबलचे मूल्य मुक्तपणे बदलू शकता परंतु आपण त्याचा प्रकार बदलू शकत नाही.
- प्रत्येक चलचे एक वेगळे नाव आहे. या व्हेरिएबलमध्ये प्रवेश करण्यासाठी आणि संदर्भ घेण्यासाठी हे नाव वापरा.
संपादन> व्हेरिएबल्स परिभाषित वर जाऊन एक व्हेरिएबल तयार करा. दिसत असलेल्या विंडोमध्ये आपल्या चलचे नाव प्रविष्ट करा आणि आपला इच्छित डेटा प्रकार निवडा (तर्कशास्त्र, संख्या किंवा मजकूर). आपल्याला यापुढे आवश्यक नसलेली चलने देखील हटवू शकता.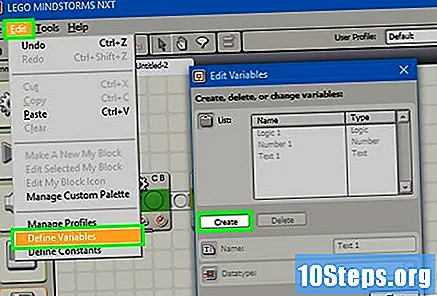
- आपले व्हेरिएबल्स वर्णनात्मक नावे द्या जेणेकरुन हे कळेल की ते कोण आहेत. आपला रोबोट पाठवित असलेला स्वागत संदेश संचयित करण्यासाठी आपल्यास एखादा व्हेरिएबल हवा असेल तर "टेक्स्ट_व्हर्व_1" ऐवजी व्हेरिएबलला "ग्रीटिंग्ज" म्हणा किंवा त्यापेक्षा अस्पष्ट काहीतरी.
आपल्या प्रोग्राममध्ये डेटा केबल्सचा वापर करून आपल्या कमांडसह कनेक्ट करुन व्हेरिएबल्स वापरा. व्हेरिएबल्स एकत्रित करण्यासाठी गणिताच्या क्रियेत त्यांना कनेक्ट करा किंवा निकाल संग्रहित करा. त्यांना नियंत्रण म्हणून वापरण्यासाठी लूप किंवा स्विचशी कनेक्ट करा आणि लूपमध्ये किंवा स्विचमध्ये बदल करा.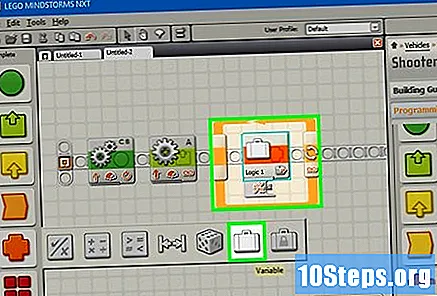
कधीही बदलत नसलेल्या चलांसाठी स्थिरांक वापरा. आपल्याला आपल्या रोबोटच्या नावासाठी मजकूर स्थिर हवा असल्यास तो सुरूवातीस संपादित करा> कॉन्स्टेंट्स परिभाषित करुन परिभाषित करा. मग आपण मूल्य स्थिर होईल की नाही याची चिंता न करता आपण हा स्थिर वापरु शकता.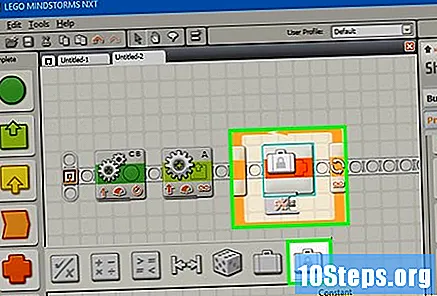
5 चे भाग 5: सानुकूल ब्लॉक वापरणे
सानुकूल कसे ब्लॉक होतात ते समजून घ्या. एक किंवा अधिक ऑपरेशन्सच्या मालिकेसाठी एक कस्टम ब्लॉक तयार करा जो आपण आपल्या प्रोग्राम दरम्यान अनेक वेळा पुन्हा कराल. उदाहरणार्थ, आपला रोबोट तीन सेकंदासाठी पुढे जायचा असेल आणि लाल बत्ती फ्लॅश करायचा असेल तर या सूचनांना सानुकूल ब्लॉकमध्ये समाविष्ट करा जेणेकरून आपण त्यांना आपल्या प्रोग्राममध्ये समाविष्ट करण्याची आवश्यकता असेल तेव्हा आपण त्यामध्ये द्रुत आणि सहज प्रवेश करू शकता.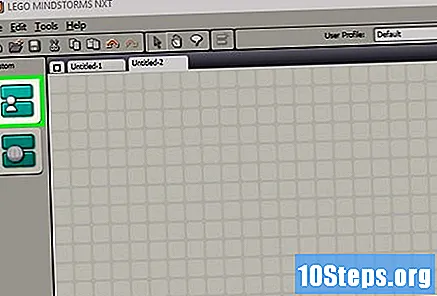
आपला सानुकूल ब्लॉक होईल अशी विविध ऑपरेशन्स ठेवा. आपण आपल्या प्रोग्रामप्रमाणेच त्यांना समाविष्ट करा.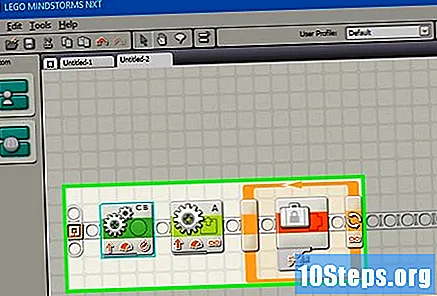
आपण सानुकूल ब्लॉकमध्ये रूपांतरित करू इच्छित सूचना निवडा. शिफ्ट दाबून ठेवा आणि प्रत्येक ऑपरेशनवर क्लिक करा. एकदा सर्व निवडल्यानंतर, टिप्स टूलच्या पुढील शीर्ष टूलबारवरील समान चिन्हावर क्लिक करा. हे "माय ब्लॉक बिल्डर" नावाची एक विंडो उघडेल. सानुकूल ब्लॉक बिल्डर उघडण्यासाठी आपण संपादन> नवीन माझे ब्लॉक तयार करा वर देखील जाऊ शकता.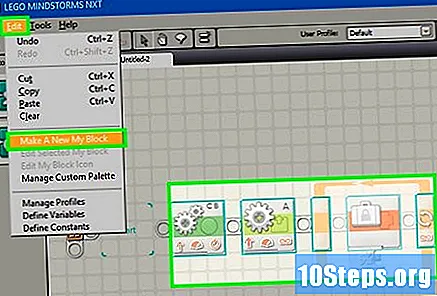
- आपण आपल्या सानुकूल ब्लॉकसाठी निवडलेल्या ब्लॉक्समध्ये किंवा त्या बाहेर काही डेटा केबल्स असल्यास आपल्या ब्लॉकसाठी ते पोर्ट म्हणून दिसतील आणि प्रोग्राममध्ये ब्लॉक वापरताना आपण त्यांना व्हेरिएबल्स किंवा इतर डेटाशी कनेक्ट करू शकता.
आपल्या सानुकूल ब्लॉकसाठी नाव आणि वर्णन प्रविष्ट करा. नाव लहान असले पाहिजे परंतु वर्णनात्मक असावे जेणेकरुन ब्लॉक काय करतो हे आपल्या लक्षात येईल. वर्णन स्पष्ट आणि तपशीलवार असणे आवश्यक आहे आणि त्यात सर्व महत्वाच्या टिपांचा समावेश असू शकेल जसे की आपल्या रोबोटला ज्या दिशेने पहातो पाहिजे त्या दिशेने किंवा ब्लॉक योग्यरित्या कार्य करण्यासाठी कोणत्या पोर्ट एला जोडणे आवश्यक आहे.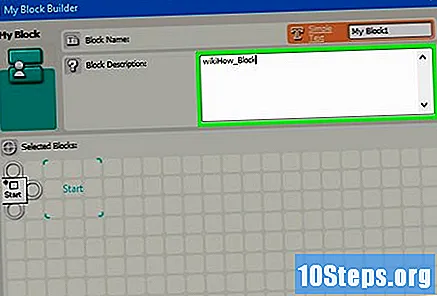
चिन्ह संपादकावर जाण्यासाठी पुढील क्लिक करा. आपल्या ब्लॉकच्या चिन्हावर आपल्याला इच्छित असलेले चिन्ह ड्रॅग करा. आपण आपले चिन्ह तयार करणे समाप्त झाल्यावर समाप्त क्लिक करा. आपल्या प्रोग्राममध्ये, आपल्या ब्लॉकशी संबंधित चरण आपण नुकत्याच तयार केलेल्या ब्लॉकद्वारे पुनर्स्थित केले जातील.
आपल्या प्रोग्राममध्ये आपला सानुकूल ब्लॉक त्याच प्रकारे वापरा की आपण इतर कोणत्याही ब्लॉकचा वापर कराल. आपला प्रोग्रामिंग अधिक सुलभ करण्यासाठी आपण अनेक सानुकूल ब्लॉक्स एकत्र देखील करू शकता. सर्जनशील व्हा - आपण त्यांचा फायदा घेतल्यास सानुकूल ब्लॉक्स आश्चर्यकारकपणे उपयुक्त ठरू शकतात.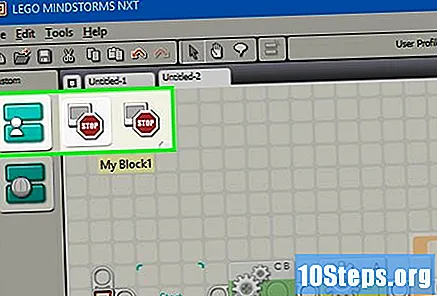
टिपा
- प्रोग्राम शिकण्याचा सर्वात सोपा मार्ग म्हणजे विशेषतः आपल्या रोबोटसह, चाचणी घेणे. एखादी विशिष्ट ऑपरेशन काय करते हे आपण जाणून घेऊ इच्छित असल्यास, त्याची चाचणी घ्या! आपण काय शिकता याची नोंद घ्या आणि नंतर आपल्या प्रोग्राममध्ये वापरा.
- आपल्या प्रोग्राम्सच्या अपेक्षेप्रमाणे काम करतात याची खात्री करण्यासाठी ते वारंवार चाचणी करा.
- अधिक क्लिष्ट ब्लॉक्स कसे वापरावे याची तपशील आणि उदाहरणे वाचण्यासाठी मदत पुस्तिका वापरण्यास घाबरू नका.


